Gökhan Tok
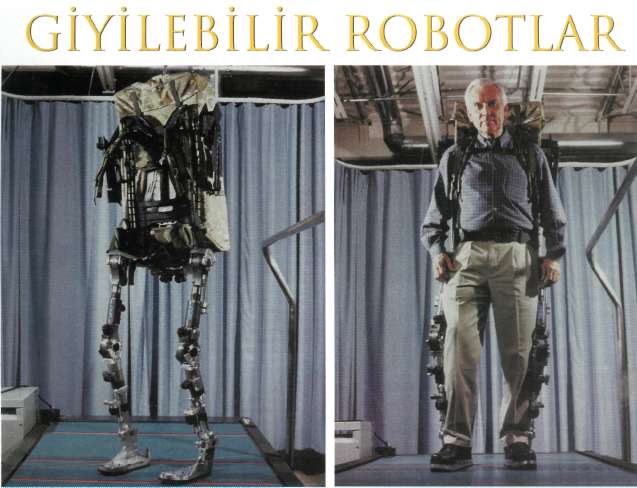
Üstün insan üzerine anlatılan öyküler Atlas'tan Zeus'a, Superman'den bilimkurgu filmleriyle tanıdığımız Ar-nold Schwarzenneger'e kadar uzanıyor. Utah Üniversitesi'nden robotik uzmanı olan Stephen Jacobsen, bunun artık gerçek dünyaya yansıtılmasının zamanının geldiğini söylüyor. Jacobsen'in Salt Lake City merkezli şirketi Sarcos, bunu gerçekleştirebilmek için robot giysiler üretiyor. Bu güçlendirilmiş iskeletler ağır yükleri uzak mesafelere taşıyabiliyor. Giysiler, bir kaza sırasında bu giysileri giyen kurtarma ekipleri kazazedeleri kolayca kurtarabiliyor, hatta bu robot giysileri giyen engelliler rahatça kendi başlarına çevrede dolaşabiliyor. Bunlar gözüpek bir vizyon olarak gö-rüebilir ve Sarcos da bunu öne süren ilk şirket, yine de Jacobsen kendine güveniyor. Kariyeri boyunca bu becerikli buluşçu birçok alet geliştirmiş. Bunlar arasında protez kollar ve Las Vegas Bellagio Otel'deki danseden çeşmeler de var. Bütün bunlar yapılırken robotik teknolojisinin elverdiği
bütün gelişmelerden yararlanılmış. Jacobsen bir çeşit dış iskelet gibi görünen bu robot giysileri yıllar boyunca geliştirdiğini ve doğruyu buluncaya kadar birçok düzeltmeler yapıldığını anlatıyor.
Algılayıcı Elbise
Jacobsen giyilebilir robotların nasıl yapıldığının süreçlerini anlatıyor. Bunun ilk aşamasında dış iskeletin tasarlanması yer alıyor. Tasarımcılar insan vücudunun nasıl hareket ettiğini öğrenmek için önce plastik bir model kullanıyorlar. Bu modeli kullanan gönüllüler üzerinde 30 algılyacıyla ölçüm yapılıyor. Böylece hareketlerin ölçüleri hesaplanıyor. Koşma, yürüme, zıplama, titreme, çömelme gibi hareketlerin nasıl olduğu, bunlar yapılırken zamanlamanın ve hareketin nasıl olduğu değerlendirilerek bilgisayara aktarılıyor.
Mini Model
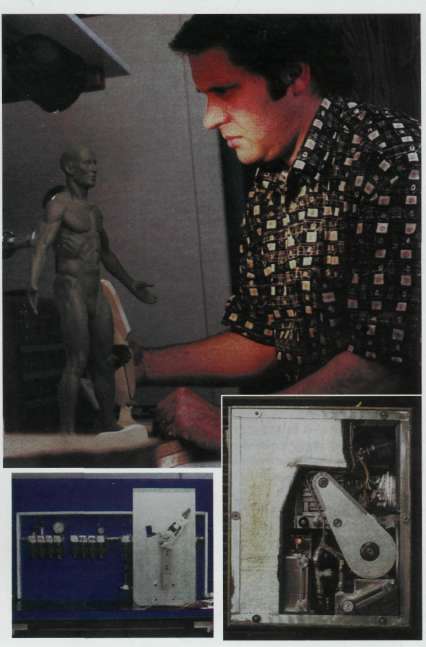
Çeşitli tasarımların nasıl yapılabileceği konusunda fiziksel modellerin
yapılmasının da önemi var. Bir donanım odasında tasarımcı Jön Price, bir insanın dörtte biri ölçeğindeki kil bir maket üzerinde minyatür tahta modellerle çalışıyor. Bu düzenek araştırmacılara deneğin çevresindeki mekanizmanın sorun çıkarıp çıkarmayacağını görmesine yarıyor. Bu aşamada yapılacak değişiklikler çok daha kolay gerçekleştirilebiliyor.
Güçlü ve Hassas
Bu dış iskeletin temel tasarımı tamamlandıktan sonra araştırmacılar tüm dikkatlerini detaylara yöneltiyor. Sözgelimi fabrikasyon test istasyonunda bir mühendis iskeletin pelvis ayarlarını yapıyor. Robot giysinin kullanıcının ne yaptığını hissetmesi ve hareketlerini kısıtlamadan ona yardımcı olması gerekiyor. Biraz güç yönlendirmesi, ki Jacobsen buna "yoldan çıkma kontrolü" adını veriyor. Bunun çalışabilmesi için karmaşık algılayıcıların kullanıcıların ayaklan çevresindeki platformlardaki bacak eklemlerinin her birine yerleştirilmesi
BİLİMveTEKNİK 24 Kasım 2004